Add New Formation¶
In this tutorial, you will learn how to create a new formation.
We are going to add a formation shaped like a sinus.
Define formation
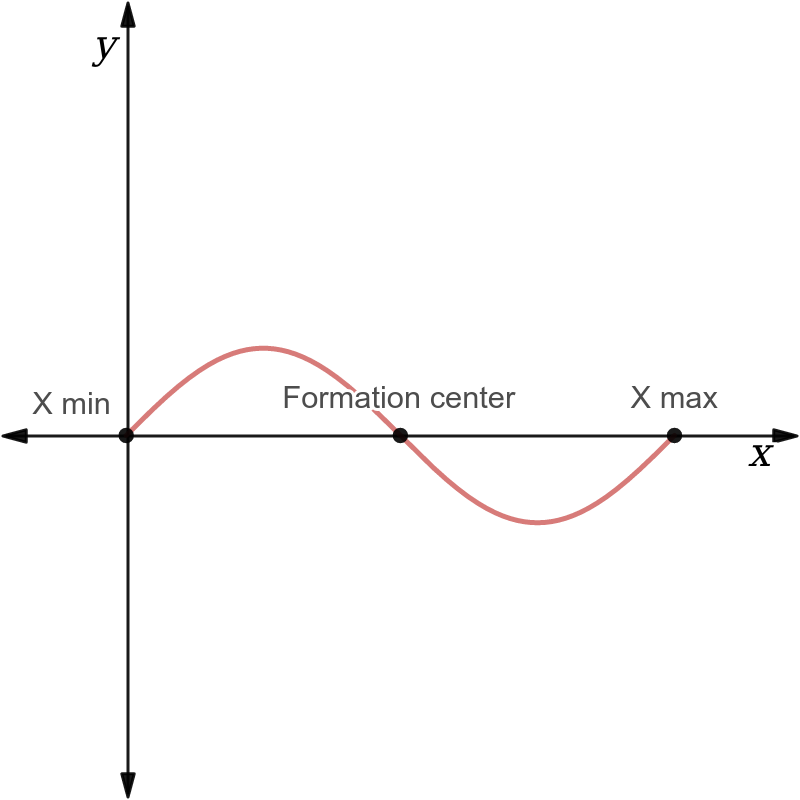
Sinus formation
- Formation center: I choose the formation center to be at the middle of the the formation X axis
- Scale: Scale will be the length of the formation
- Agents repartition: Agents will be equally distant on the X axis. Y position will be \(A*sin(\omega*x)\).
Create new formation file
File path:
.../crazyflie_charles/ros_ws/src/formation_manager/scripts/sin_formation.py#!/usr/bin/env python """Sinus formation """ from math import sin, cos, pi import rospy from crazyflie_driver.msg import Position from general_formation import FormationClass, compute_info_from_center class SinFormation(FormationClass): """Sinus formation Notes: scale: Total lenght of period """ def __init__(self, min_dist): super(SinFormation, self).__init__(min_dist) # TODO: Add formation specific attributes self.compute_min_scale() # Setter def set_n_agents(self, n_agents): # TODO: Verify number of agents is valid self.update_formation_scale() self.compute_min_scale() # Computing def compute_min_scale(self): # TODO: Compute min scale where min distance between agents is R_MIN pass def compute_formation_positions(self): for i in range(self._n_agents): if rospy.is_shutdown(): break # Initialize agent formation goal self._agents_goals[i] = Position() # Compute formation position # TODO: Compute agent position from center # Compute information from center center_dist, theta, center_height = compute_info_from_center([x_dist, y_dist, z_dist]) self._center_dist[i] = center_dist self._angle[i] = theta self._center_height[i] = center_height return self._agents_goals def update_formation_scale(self): #TODO: Update formation scale pass
Init method
Two atributes will be required: x_agents_dist and frequency, to vary formation length based on scale.
Another attribute will be added to easily change the sinus amplitude.
def __init__(self, min_dist): super(SinFormation, self).__init__(min_dist) self.agents_x_dist = 0 # [m] self.frequency = 0 # [rad] self.amplitude = 1 # [m] self.compute_min_scale()
Verify number of agents
Before setting a new number of agents, it’s important to make sure the number is valid. For instance, only perfect square numbers are valid for the square formation.
However, all numbers are valid for the sinus formation.
def set_n_agents(self, n_agents): # All numbers are valid if n_agents > 0: self._n_agents = n_agents self._n_agents_landed = 0 else: rospy.loginfo("Formation: Unsuported number of agents, landing %i agents"\ % self._n_agents_landed) rospy.loginfo("Formation: %i agents in formation" % self._n_agents) self.update_formation_scale() self.compute_min_scale()
Compute formation attributes based on scale
First let’s compute the distance between agents
self.agents_x_dist = self._scale / (self._n_agents - 1) if self._n_agents > 1 else 0
And then the formation frequency
self.frequency = (2*pi)/self._scale if self._scale > 0 else 0
def update_formation_scale(self): self.agents_x_dist = self._scale / (self._n_agents - 1) if self._n_agents > 1 else 0 self.frequency = (2*pi)/self._scale if self._scale > 0 else 0
Find minimum scale
The minimum scale is defined as the scale where the minimal distance between two agents is
R_MIN. For this formation, to simplify calculations, we will consider as if the formation was a simple line.Hence, the min_scale is when the distance between agents is equal to
R_MIN( or_min_dist)def compute_min_scale(self): if self._n_agents > 1: self._min_scale = self._min_dist*(self._n_agents - 1) else: self._min_scale = 0.0
Compute agents position from center
We have to compute each agent position in x, y, and z from formation center.
X position
x_dist = self.agents_x_dist*i - center_offset
Note
center_offset = self._scale/2is substracted from X position since the first agent is not at the center.Y positions
y_dist = self.amplitude*sin(self.frequency*x_dist)
Z positions
z_dist = 0
Completed function
def compute_formation_positions(self): center_offset = self._scale/2 # New line for i in range(self._n_agents): if rospy.is_shutdown(): break # Initialize agent formation goal self._agents_goals[i] = Position() # Compute formation position x_dist = self.agents_x_dist*i - center_offset # New line y_dist = self.amplitude*sin(self.frequency*x_dist) # New line z_dist = 0 # New line # Compute information from center center_dist, theta, center_height = compute_info_from_center([x_dist, y_dist, z_dist]) self._center_dist[i] = center_dist self._angle[i] = theta self._center_height[i] = center_height return self._agents_goals
Add formation to
formation_manager_ros# .../crazyflie_charles/ros_ws/src/formation_manager/scripts/formation_manager_ros.py`` ... from sin_formation import SinFormation # New line ... class FormationManager(object): ... def __init__(self, cf_list, min_dist, start_goal): ... #: All possible formations self._formations = {"square": SquareFormation(self._min_dist), "v": VFormation(self._min_dist), "pyramid": PyramidFormation(self._min_dist), "circle": CircleFormation(self._min_dist), "line": LineFormation(self._min_dist), "sin": SinFormation(self._min_dist),} # New line ... ...
Test new formation
swarm = SwarmAPI() swarm.set_mode("formation") swarm.set_formation("sin") swarm.take_off()
Note
Completed sinus formation file can be found in .../crazyflie_charles/demos